
 产品:4
产品:4
 联系我们
联系我们

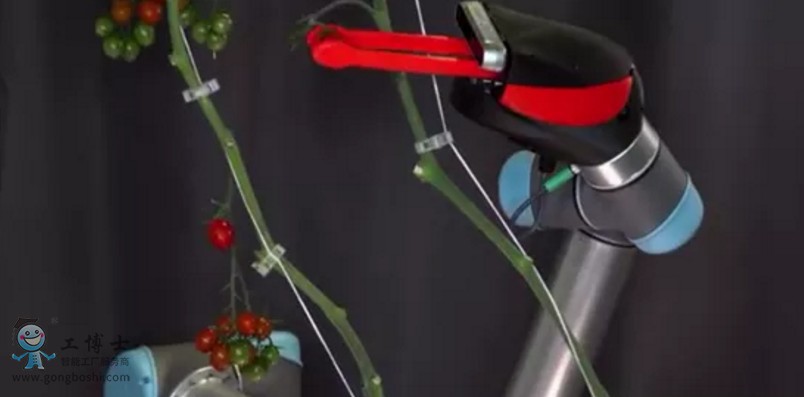
协作机器人不仅仅在传统工业的应用,在农业场景中也发挥了重要的作用。本文简单介绍优傲机器人在农业采摘的使用情况。
优傲协作式机器人提供四种不同的有效载荷3、5、10、16公斤。适合的应用范围广泛,同时具有六个自由度和超凡的灵活性,能够与现有生产环境轻松集成,这使我们的协作式机器人可以拥抱更广阔的天地。选择zui符合您需求的协作式机器人手臂。
优傲机器人在农业中的应用
项目场景背景:
农业作业比较复杂,季节性很强;若使用人工采摘,不仅效率低,而且劳动量大。人力采摘己成为制约规模扩大的瓶颈;采摘窗口过短也限制了果种植与采摘的规模化运用。
采摘机器人可以大幅降低人工工作量与费用,同时可以实现在合适的采摘窗口内的规模化采摘。因此,推进采摘机器人的研究对促进产业升级有着举足轻重的意义。
对于采摘机器人而言,图像识别系统是采摘机器人的眼睛,也是至关重要的子系统,工具端类似人的手掌。设计高效的图像识别系统,工具端抓取系统,对于采摘机器人有着深远的意义。
主要难点:
1)视觉主要难点:
其中有待提高的关键技术就是其图像识别技术。
-
生长环境复杂,
-
光照不均匀,室内外
-
图像上存在大量的干扰区域;目标颜色不均匀,与枝叶区别度低;
- 目标空间分布不均匀,
- 相互重叠遮挡;
果枝叶繁盛,且与果实之间互相遮挡。
可尝试使用Roboception双目视觉结合训练算法解决相关检测问题。
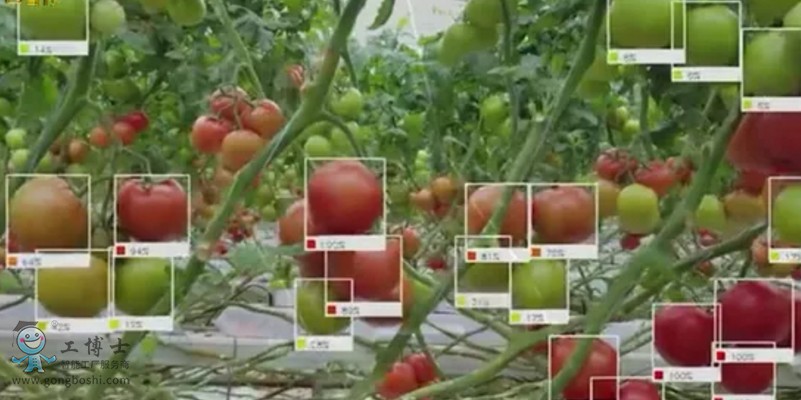
在农业机器人中,它提供了校正后的摄像机,视差,置信度和错误图像,这些图像使所查看场景的深度值及其不确定性得以计算。此外,图像中视觉特征的运动与高速率下的加速度和转弯速率测量相结合,这使传感器能够提供其当前姿态,速度和加速度的实时估计。
更多资讯:优傲机械臂